Paying attention to “Action on loss of RC” setting
In order to use 20 vehicles without remote controllers (RC) Action on the loss of RC has to be disabled, meaning that there will be no reaction on either enabling or disabling Remote Controller (the vehicle can still be taken over using the Remote controller at any time). This can be done either from Mission Planner or using vsm-ardupilot.conf file.
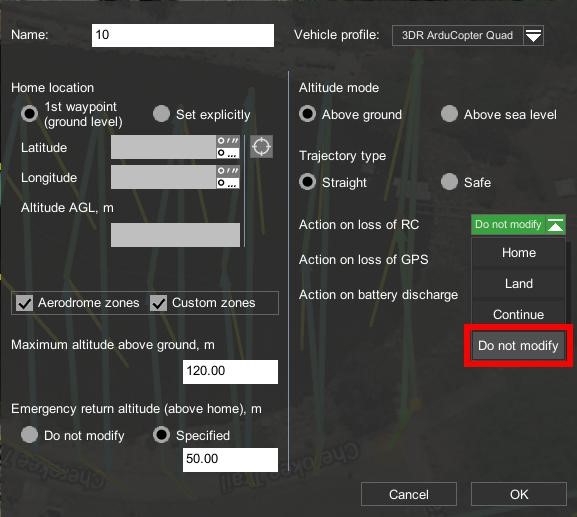
Note: When planning routes it is necessary to set “Action on the loss of RC” within route parameters to “Do not modify”. Otherwise, the action will be changed during route upload.
Updated over 1 year ago
Did this page help you?