Using UgCS to control servo output during flight (for show effects)
For show purposes, the UgCS client with UgCS Commander features servo output control for Pixhawk autopilots. It can be pre-programmed during planning to be activated autonomously during route execution or can be changed instantly using a command. The output PWM (Pulse-width modulation) signal can be used to operate show elements like lights, smoke, and others.
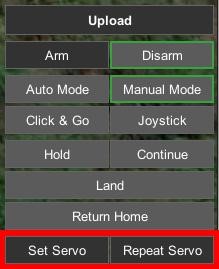
There are two different functions available – Set Servo and Repeat Servo. The functions can be either used as a waypoint action when the action will be engaged as soon as the vehicle reaches the waypoint during route execution, or as a command to manually engage the action.


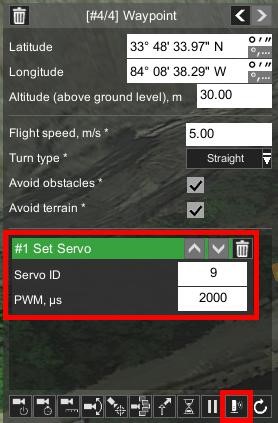
Set Servo – sends the PWM signal continuously until a different PWM is set, has two
parameters:
• Servo ID
• PWM, μs
Repeat Servo – periodically changes PWM output to the set one and back to default has the
following parameters:
• Servo ID
• PWM, μs
• Delay, s – period of time after which servo level changes
• Cycles – after completing the number of cycles signal returns to the default
It is recommended to connect the peripheral, which needs to be controlled in the following way:
• Power (+ and -) are connected to the RC port of Pixhawk
• Signal pin is connected to port 1 of Aux Out
Updated over 1 year ago